POE指数积公式的简单matlab实现
参考现代机器人学
及机器人工程师进阶之路(八)指数积(PoE)建立机械臂模型及正运动
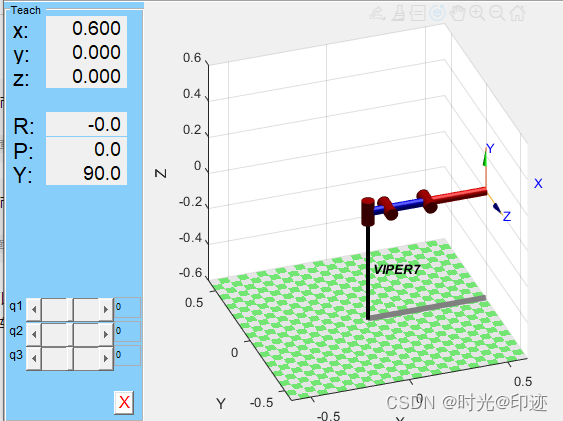
1.使用Robotics在matlab中建立一个简单的机械臂,方便验证后面的代码写的对不对
%Robotics 工具箱介绍: https://blog.csdn.net/weixin_43365751/article/details/100101827
%安装: https://petercorke.com/toolboxes/robotics-toolbox/
% clc
% clear
%% 定义连杆
%L=Link([theta,d,a,alpha],standard/modified)%
% theta kinematic: joint angle 绕Z轴旋转角度
% d kinematic: link offset 绕Z轴平移距离
% a kinematic: link length 绕X轴平移距离
% alpha kinematic: link twist 绕X轴旋转角度
L1 = Link([0 0 0.1 pi/2]); %关节2相对于关节1的参数
L2 = Link([0 0 0.2 0]);
L3 = Link([0 0 0.3 0]);
b=isrevolute(L1); %Link 类函数,转动关节变量
robot=SerialLink([L1,L2,L3],'name','VIPER7','comment','LL'); %SerialLink 类函数
%robot.name='VIPER7';
%robot.comment='LL';
figure(2)
robot.display(); %Link 类函数,显示建立的机器人DH参数
%通过手动输入各个连杆转角,模型会自动运动到相应位置
theta=[0 0 0];
robot.plot(theta); %展示
robot.teach(theta);
pos=robot.fkine(theta) %计算机器人正运动学,括号内为theta值
2.建立POE指数积的代码
步骤:
一、当机器人处于初始位置时,末端位形M
二、当机器人处于初始位置时,相对基坐标系的螺旋轴S 1 , ⋯ S n ,对应各个关节的旋转轴w和运动旋量v
v的计算公式为v=-w_h*q q为选取旋转轴上的一点的坐标 w_h为w的三维矩阵形式
三、用POE公式进行计算

L1 = 0.1; L2 = 0.2 ; L3 = 0.3;
%各轴角度
theta = [0,0,0];
%初始坐标 式(4.6)
M=[1 ,0 ,0, L1+L2+L3;
0 ,1 ,0, 0;
0 ,0 ,1, 0;
0 ,0 ,0, 1];
%旋转轴 3*1
w1 = [0 ; 0; 1];
w2 = [0 ; 1; 0];
w3 = [0 ; 1; 0];
%转换成旋转矩阵的形式
w1_h = slove_m(w1);
w2_h = slove_m(w2);
w3_h = slove_m(w3);
%选取关节上的点 3*1
p1 = [0 ;0 ;0];
p2 = [L1;0 ;0];
p3 = [L1+L2;0 ;0];
%求线速度 85页【117】 v=-w*q
v1 = -w1_h*p1;
v2 = -w2_h*p2;
v3 = -w3_h*p3;
%式(3.85)
s1 = [w1_h,p1;0 ,0,0,0];
s2 = [w2_h,p2;0 ,0,0,0];
s3 = [w3_h,p3;0 ,0,0,0];
pos = esc(w1_h,v1,theta(1))*esc(w2_h,v2,theta(2))*esc(w3_h,v3,theta(3)) *M
%% 式(3.85)
function w_h = slove_m(w)
w_h=[0, -w(3), w(2);
w(3), 0, -w(1);
-w(2), w(1), 0];
end
%% 命题3.25
function T = esc(w,v,theta)
if NearZero(norm(w)) %式(3.89) 如果w=0
T = [eye(3), v*theta; 0, 0, 0, 1];
else %式(3.88)
T = [eye(3) + sin(theta) * w + (1 - cos(theta)) * w * w , ...
(eye(3) * theta + (1 - cos(theta)) * w ...
+ (theta - sin(theta)) * w * w)* v;
0, 0, 0, 1];
end
end
%%
function judge = NearZero(near)
judge = norm(near) < 1e-6;
end
3.与Robotics 的计算结果进行对比
当 theta = [pi/4,pi/4,0] 时
POE的结果如下
pos =
0.5000 -0.7071 0.5000 0.3207
0.5000 0.7071 0.5000 0.3207
-0.7071 0 0.7071 -0.3536
0 0 0 1.0000
Robotics 的结果如下
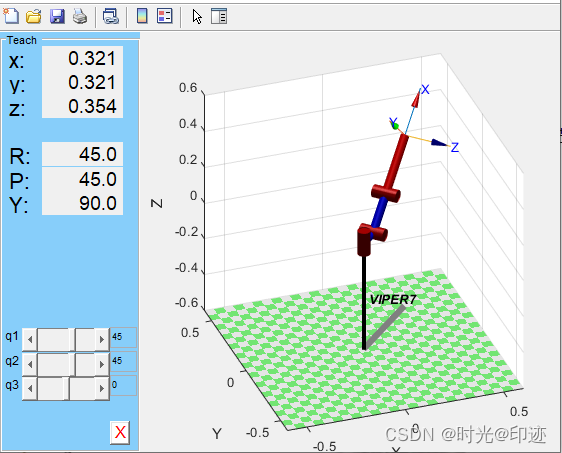
x y的坐标差不多,不知道为啥z方向坐标相反了。
版权声明:本文为weixin_42454034原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。