HoughLines获取的角度说明
CV_EXPORTS_W void HoughLines( InputArray image, OutputArray lines,
double rho, double theta, int threshold,
double srn = 0, double stn = 0,
double min_theta = 0, double max_theta = CV_PI )
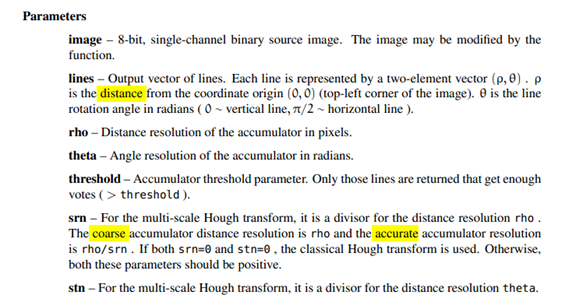
Image必须是8位单通道图(可以使灰度图、二值图、边缘图等)
Rho:距离分辨率,一般为1
Theta:角度分辨率,一般为CV_PI/180
Threshold:阈值,只返回像素和大于threshold的直线
Srn:(猜测)距离缩放
Stn:(猜测)角度缩放。
vector<Vec2f> lines;
//lines中每一成员由具备两个元素的矢量Vec2f表示。
//极半径r:离坐标原点((0, 0)(也就是图像的左上角)的距离.
//theta:弧度线条旋转角度( 0:垂直线 ; π/2:水平线)
//theta为直线与Y轴负方向的夹角,以Y轴负轴为起始轴,逆时针旋转到直线
版权声明:本文为thequitesunshine007原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。