全覆盖路径规划思想(1)
全覆盖路径规划
主要用于目前比较火的全自动扫地机、洗地机。需要要求机器人遍历一个地图中所有空间。本文章仅描述其基本原理。
输入条件
输入:
- 一张地图
- 清扫边界
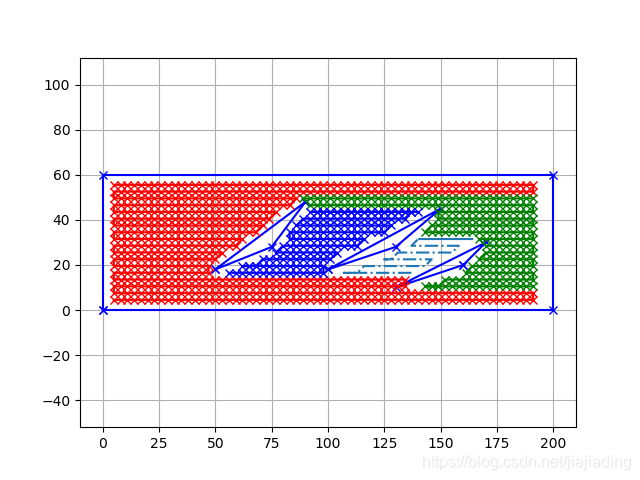
ox_outside = [0.0, 200.0, 200, 0.0, 0.0] # 外边界,即清扫范围
oy_outside = [0.0, 0.0, 60, 60.0, 0.0]
ox_inside = [[50, 90, 75, 50],[100, 150, 130, 100],[160, 170, 130 , 160]] # 内部障碍边界
oy_inside = [[18, 48, 28, 18],[18 , 45, 28, 18] ,[20, 30, 10, 20]]
输出:
- 全覆盖路线
全局规划思想
- 根据边界提取一张地图中所需覆盖范围,即清扫范围;
- 根据外边界,提取最长边界,用于覆盖时的遍历的方向,并记录一个顶点,用于原点;
max_dist = 0.0
vec = [0.0, 0.0]
sweep_start_pos = [0.0, 0.0]
for i in range(len(ox) - 1):
dx = ox[i + 1] - ox[i]
dy = oy[i + 1] - oy[i]
d = np.sqrt(dx ** 2 + dy ** 2)
if d > max_dist:
max_dist = d
vec = [dx, dy] #最长边向量,即斜率
ori_pos = [ox[i], oy[i]] #最长边起始顶点
- 根据最长边和一个顶点,将清扫边界和内部障碍物,进行坐标转换,即旋转和平移;将记录的一顶点,作为原点,将最长边作为X轴正方向,进行坐标转换。
- 经过以上步骤,则目前清扫范围在x轴方向最长,因此为最适合遍历方向;
- 构建栅格地图,将边界外以及障碍物内全部标记为1,而清扫区域标记为0;
- 栅格地图进行膨胀,主要考虑机器人大小问题;
- 栅格地图闭算法,主要是滤除掉
- 定义清扫的主要方向,从下到上,第一次从左到右。(可更改,本文仅以此种情况说明)
- 查找清扫起始点,方法是从栅格图最下一行从左到右进行遍历,查找第一个标记为0的栅格,则为起始坐标;
- 查找终点,方法与9一样;
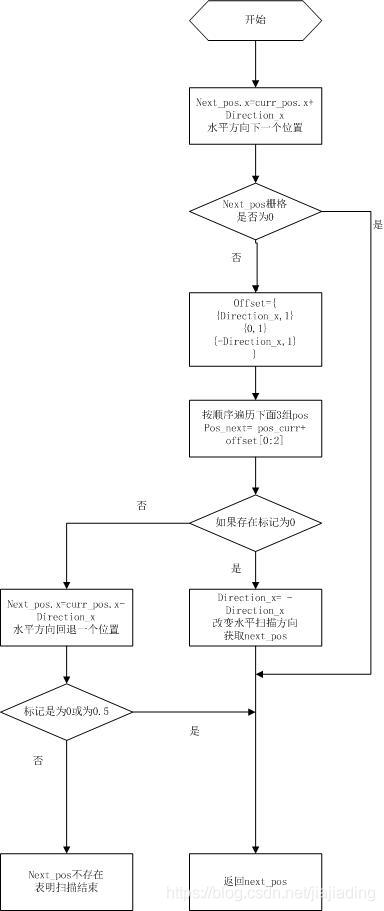
- 从起点开始开始查找下一个点;
- 判断是否为终点或者不存在下一个点,否则执行11步骤;
- 记录每一个点坐标,根据原点和长边向量,还原坐标;
- 同时9~12步可执行多次,如此可进行分区覆盖;采用python仿真效果图如下:
判断下一点
已知:
版权声明:本文为jiajiading原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。