【四足机器人支撑腿反作用力规划】未简化的动力学模型规划反作用力 +运动学模型雅可比+虚功原理规划关节扭矩方法
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对未简化的动力学模型规划反作用力 +运动学模型雅可比+虚功原理规划关节扭矩方法做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
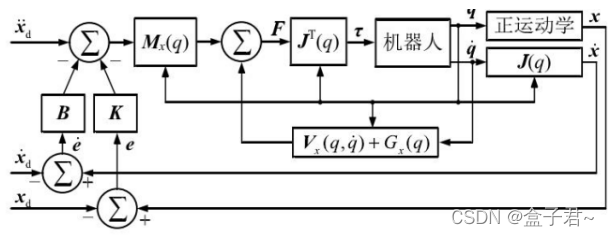
一、基于动力学模型的工作空间控制框图
.
.
二、原理推导
基于机器人的动力学模型要考虑机器人的质量
并补偿向心力和柯氏力
还要补偿重力项
设控制误差为

动力学控制模型,即反作用力计算公式为

通过雅可比转置计算每个关节的转矩

.
.
.
.
三、缺点
四足机器人上没有绝对固定的参考坐标系,为浮动基座系统,直接利用基于模型的工作空间控制方法将会非常困难。因此,四足机器人的运动控制并不适合使用这种基于动力学模型的工作空间控制方法
版权声明:本文为qq_35635374原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。