ROS综合应用(一)树莓派外部控制 Pixhawk(一站到底)
序言
上一次 说到学习 ROS,主要是因为在做多无人机协同控制项目。听说可以使用 ROS 来实现树莓派控制 Pixhawk 无人机,这样可以不用修改飞控源码,而且可以用树莓派做图像处理。于是开始了一场浩浩荡荡的西行,可奈何刚翻过几座山,又越过几条河,妖魔鬼怪怎么这么多。不过一条总结是多去官网,博客鱼龙混杂,而且很多时候版本不合,不可使用。
折腾了好久好久,终于完成了环境搭建,后面也测试成功,因此想记录一下。
注:初学外部控制时,请勿挂上螺旋桨,否则很危险!!!
一、系统环境
| 软硬件名称 | 版本 | 备注 |
|---|---|---|
| 树莓派 | Raspberry Pi 3B | 无 |
| 树莓派操作系统 | Ubuntu 16.04 MATE | 无 |
| 树莓派和笔记本 | ROS (Melodic) 和 MAVROS | Moledic 似乎只支持Ubuntu18.04 及以上 |
| 树莓派和笔记本 | python 要默认为 python2 | 不然安装 ROS 会有问题 |
| 飞控 | Pixhawk 2.4.8 | 无 |
| 飞控固件版本 | PX4 v1.8.2 (stable) | 要自己编译下载(不要怕,此文一一道来) |
| 笔记本操作系统 | Ubuntu 18.04 | 编译固件,相传 Windows编译源码很慢 |
| 笔记本关键软件 | QGroundControl v3.5.6 | 用于设置飞控 TELEM波特率 |
| 笔记本关键软件 | putty | 用于远程登录树莓派 |
| 其他硬件 | USB转TTL | 和无人机TELEM 2 通信时需要 |
假设你已经完成以上软硬件安装,注意QGC 使用的最新PX4 固件为 v1.10.1 ,找不到下面的 SYS_COMPANION 参数,不知为何,就是不行,程序卡在自己编写的第一个 while() 循环里。至于如何下载自己想要的版本,下次专门说.
二、飞控板设置
飞控板的主设置主要实现下载固件 v1.8.2 (stable)
2.1 登出再重新登入用户
sudo usermod -a -G dialout $USER
然后Ubuntu18.04 就是右上角注销,然后再登陆。

2.2 克隆飞控源码
git clone https://github.com/PX4/Firmware.git # 下载源码
git tag # 查看发行版本
git checkout v1.8.2 # 选择需要的版本
2.3 搭建编译环境
安装必须环境,有问题请参考 PX4 Developer Guide
首先下载 ubuntu_sim_common_deps.sh,直接点进去复制里面内容或者 wget 下载皆可尝试,有时会连接不上,然后运行,这里面相当于把许多 shell 指令集合在一起,一次性安装完成。
# 下载 ubuntu_sim_common_deps.sh
wget https://raw.githubusercontent.com/PX4/Devguide/v1.9.0/build_scripts/ubuntu_sim_common_deps.sh
bash ubuntu_sim_common_deps.sh
2.4 编译与上传
Pixhawk 对应的固件在这里。我的是 Pixhawk2.4.8,也就是Pixhawk2,因此选择 px4fmu-v3_default 。
make px4fmu-v3_default # 编译(第一次还会下载很多模块,耐心等待)
make px4fmu-v3_default upload # 编译上传
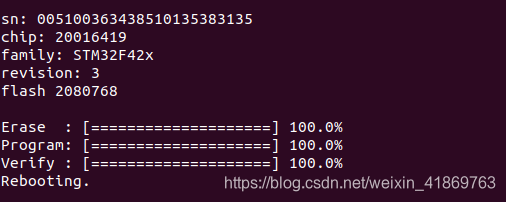
此时连上飞控,就可以下载,正常的话会得到如下界面:
2.5 使能外部控制
如果传感器这些没有校正,请先校正,遥控器和飞行模式可以不用管。然后继续往下。
搜索参数 RC_MAP_OFFB_SW,设置为 Channel1
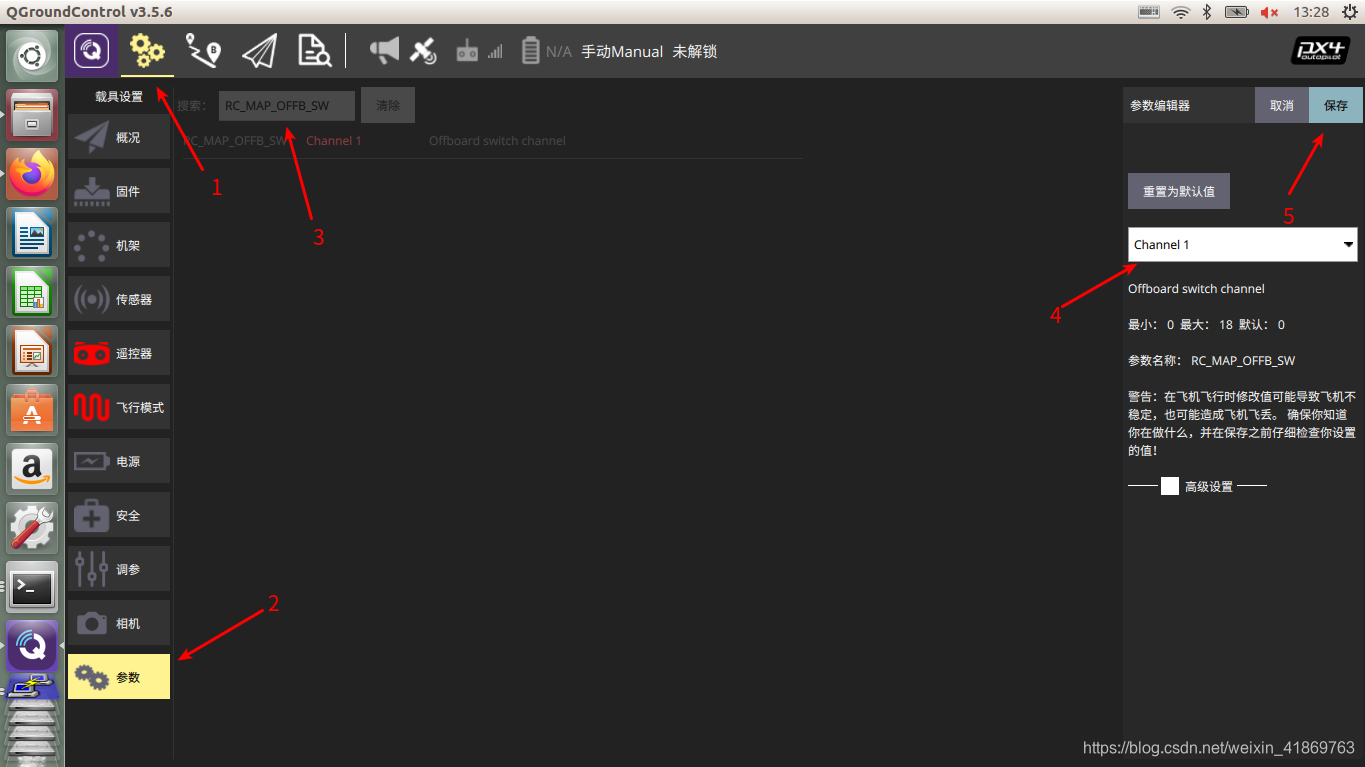
同样的方式,设置 SYS_COMPANION 为 57600
然后重新拔插,使设置有效。
三、树莓派设置(完全可以先用笔记本测试)
在树莓派上,需要新增一个 ROS 程序包,然后这个包里添加自己读取的程序。这一步骤与 ROS学习笔记(二)——文件系统、创建并编译程序包 的 2.2 创建ROS程序包 的步骤基本一致,如下:
3.1 配置环境
安装MAVROS,此处使用二进制安装(比官网推荐的源安装方便很多)
sudo apt-get install ros-kinetic-mavros ros-kinetic-mavros-extras ros-kinetic-control-toolbox
安装地理数据集
sudo /opt/ros/kinetic/lib/mavros/install_geographiclib_datasets.sh # 可能会有点慢,耐心等待
3.2 创建程序包
cd ~/catkin_ws/src
catkin_create_pkg offb geometry_msgs mavros roscpp
#程序包名称 pi_offboard_px4,依赖的包 geometry_msgs, mavros 和 roscpp
3.3 添加 .cpp 文件及必要修改
cd offb/src
touch offb_node.cpp
vim offb_node.cpp
添加以下来自 PX4官方教程的MAVROS控制例程:
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
注:如果手写以上内容,很可能出错,编译产生Invocking "make -j4 -l4" failed,请根据错误多次排查。
接下来修改 CMakeLists.txt 以便编译。
cd ~/catkin_ws/src/offb/
vim CMakeLists.txt
取消注释/修改文本,得到如下两句:
add_executable(offb src/offb_node.cpp)
target_link_libraries(offb
${catkin_LIBRARIES}
)
3.4 编译
catkin_make #编译
catkin_make install
source devel/setup.bash #配置catkin 工作空间
四、连接测试(完全可以先用笔记本测试)
4.1 连接
使用USB转TTL 连接树莓派 与Pixhawk 的TELEM 2 端口 ,TELEM 2 输入电压为5V, USB转TTL使用5V的。
飞控板 TELEM2 字是正的,那么从左到右六个接口分别为:
5V TX RX 无用 无用 GND
实物连接图如下,从Pixhawk到树莓派的线的真实连接为:红-紫,白-灰,黑-绿,黄-蓝。
4.2 测试
这个过程需要树莓派打开几个终端,可以多登录几个 putty 实现。
在一个终端中运行 roscore ,启动 ROS。
roscore
在另一个终端中运行
ls /dev/tty* # 下面两句只运行一句即可(根据有 ttyUSB0 还是 ttyACM0)
roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:57600 #有ttyUSB0
roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:57600 #有ttyACM0
再在另一个终端运行
rosrun offb offb_node
此时还可以再另一个终端运行
rostopic list
rostopic echo /mavros/altitude
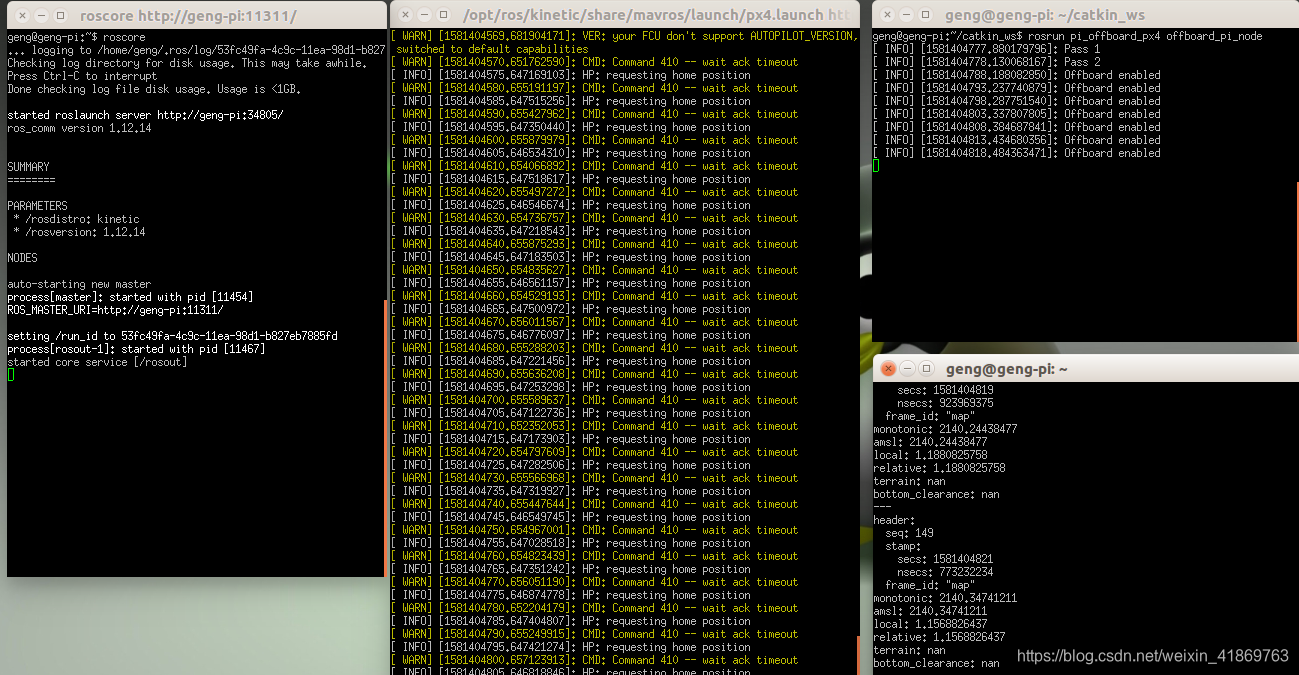
查看当地海拔高度。当然,如果在 offboard_pi_node.cpp 里添加这些话题,也直接能够读取处理打印。
运行效果如下图
参考连接:PX4 无人机MAVROS 外部控制教程