相机标定:(2)内\外参矩阵和畸变矩阵
由(1)我们知道相机模型:相机标定:(1)相机模型_Upupup6的博客-CSDN博客
标定一共分为两个部分:
(1)在进行精度较高的测量时,需要校正畸变即图像的畸变矫正,需要进行相机标定 !(是自身的)
(2)相机和机器人之间标定 =手眼标定!
0、标定的意义
无论是在图像测量或者机器视觉应用中,摄像机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响摄像机工作产生结果的准确性。因此,做好摄像机标定是做好后续工作的前提,是提高标定精度是科研工作的重点所在。其标定的目的就是为了相机内参、外参、畸变参数。
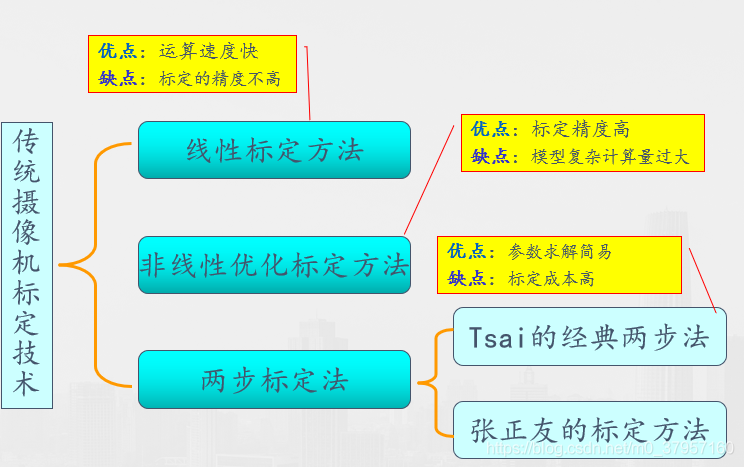
1、相机标定的方法有:
2、四大坐标系
前面已经说过,相机标定的目的之一是为了建立物体从三维世界到成像平面上各坐标点的对应关系,所以首先我们需要定义这样几个坐标系
版权声明:本文为m0_37957160原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
THE END