ROS创建工作空间与功能包
ROS学习笔记
学习古月居ros21讲笔记
第一章 ROS命令行工具的使用
第二章 创建工作空间与功能包
目录
一、工作空间
工作空间是存放ROS工程相关文件的文件夹
所有的源码,编译文件等都会放在其中
工作空间共分为4个主要文件夹
- 1.src 代码空间 (所有代码)
- 2.build 编译空间 (编译过程中产生文件)
- 3.devel 开发空间 (存放编译出的文件)
- 4.install 安装空间 (用install安装好的文件)
创建工作空间:
//创建工作空间
mkdir aha //生成了一个在根目录下的文件夹(此文件夹随意取名)
cd aha
mkdir src //在此文件夹下生成src文件夹(文件夹名必须为src)
cd src
catkin_init_workspace //将aha设为工作空间,,此时src中有一个txt文件
//编译工作空间
cd ..
catkin_make //回到工作空间目录,在工作空间里进行编译,,此时aha中多了build和devel
catkin_make install //install文件出现
//设置与检查环境变量(主要是生成功能包后使用,此处就介绍一下)
source devel/setup.bash //设置环境变量
echo $ROS_PACKAGE_PATH //检查环境变量 ,将会输出带有此工作空间的一串 /home/a/aha/src:+其它生成aha工作空间
二、功能包
是放置ROS源码的最小单元
//创建功能包
cd aha/src //进入代码空间,功能包是存放源码的,当然在代码空间里
//catkin_create_pkg + 功能包名(随便取) + 其他的功能包(想写多少写多少,代表此功能包依赖他们,即你可以在你生成的功能包中使用他们的功能)
catkin_create_pkg workpackage rospy roscpp std_msgs //roscpp,rospy是需要用c++,python写程序,std_msgs是ros定义的标准消息结构此时aha/src中将生成你所生成的功能包workspace
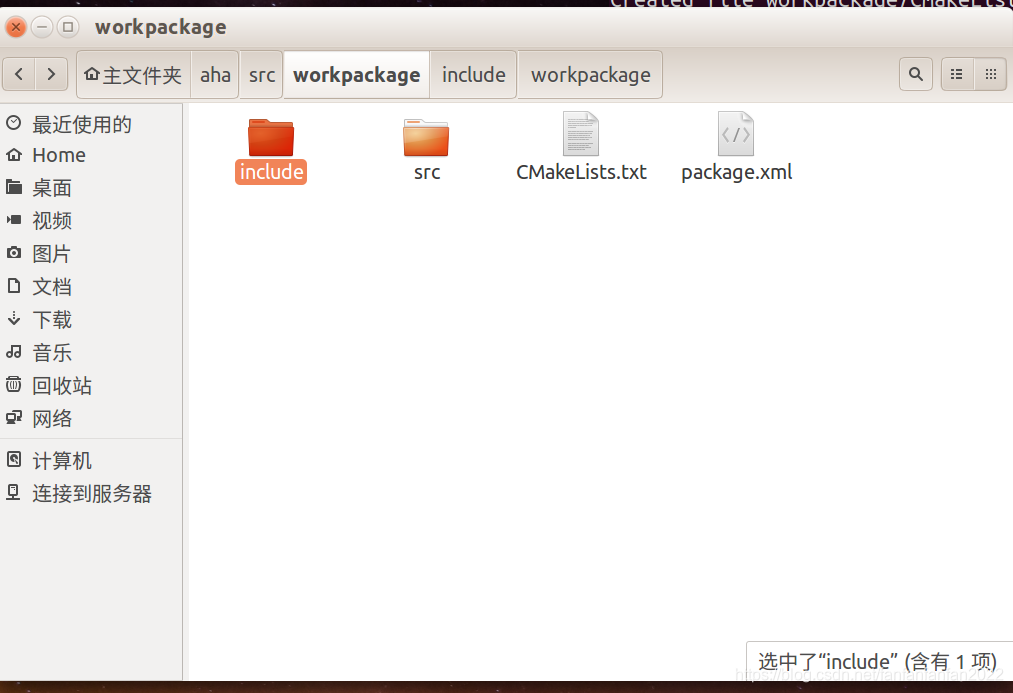
include是存放头文件的
src是存放功能包代码的
其余两个文件时每个功能包中都必须存在的
cd .. //回到工作空间
catkin_make //编译,,此时在其中可以发现一个功能包
source devel/setup.bash //设置环境变量,此后加入的程序才可以正常运行
echo $ROS_PACKAGE_PATH //检查环境变量生成workpackage功能包
版权声明:本文为fanfanfanfan2022原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。