matlab求解雅可比矩阵_雅可比与逆运动学
- 作者采用旋量建立机器人运动学,常规DH与旋量之间的转换,作者主要基于a href="https://github.com/NxRLab/ModernRobotics">《 Modern Robotics Mechanics,Planning , and Control》[1]一书,作者的Github中给出了相关的的C语言算法代码,详细的逆运动学求解过程如下:
机器人学之逆运动学数值解法及SVD算法blog.csdn.net
- 作者给出了DH参数与旋量参数的转换方法,作者主要有两篇文章:1)POE2DH(IEEE Robotics and Automation Letters. 2017)2)GeneralPOE2DH(ICRA 2019)
POE2DH.pdf
1.8M
·
百度网盘
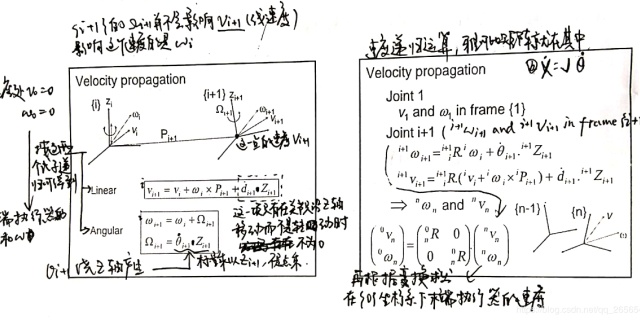
- 在计算逆运动学时,首先要得到机器人的雅可比矩阵,作者介绍了DH与MDH的雅可比矩阵,总结了一些经典书籍采用的建模方法,并给了相关matlab代码。
机器人学回炉重造(2-2):雅可比矩阵的求法--矢量积法、微分变换法、Manipulator Jacobian(Jacobian for short)blog.csdn.net
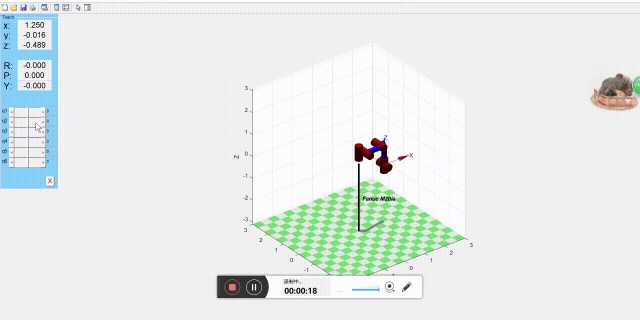
- Robotics System Toolbox工具箱,作者给出了lbr机器人逆运动学例程,在作者的博客中有一系列该工具箱的使用教程,对雅可比的认识。
Robotics System Toolbox学习笔记(五):generalizedInverseKinematics建立多约束逆运动学求解器blog.csdn.net

- Matlab Robotics Toolbox工具箱,作者从安装到运动学、动力学、规划等给出了全面的使用教程。
Matlab Robotics Toolbox 仿真计算:Kinematics, Dynamics, Trajectory Generationblog.csdn.net
Matlab Robotics Toolbox 仿真计算:Kinematics, Dynamics, Trajectory Generationwww.cnblogs.com
- 逆运动学matlab程序Robot-Arm-Kinematics-MATLAB-Function-package,可参考,采用四元数
参考
- ^本书GitHub