ROS 学习踩坑笔记6 – ROS Gazebo 仿真深度相机时, 在RVIZ查看深度图时, 深度图像一直闪烁
存在问题: ROS Gazebo 仿真深度相机时, 在RVIZ查看深度图时, 深度图像一直闪烁
-> 解决方法:
-
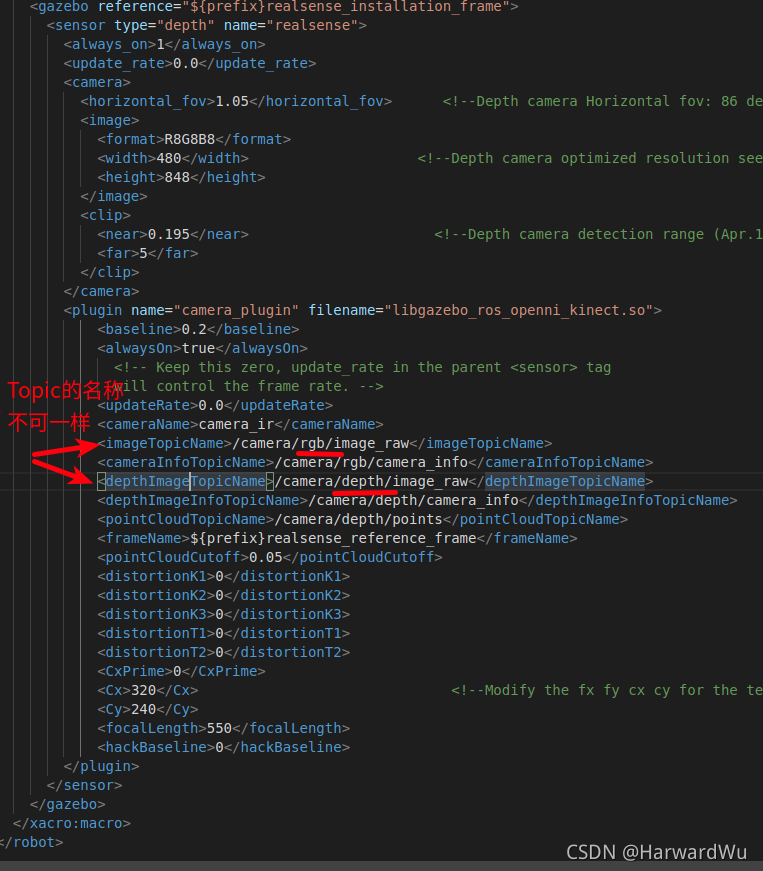
首先需要检查相机的xacro/srdf文件中, 深度图的Topic和rgb相机的发布topic是否一致, 若一致的话,会造成rgb 图像信息和depth图像信息交替发布在同一个topic上, 导致查看depth图片的石斛一直闪烁!
-
将RGB相机发布的topic和depth相机发布的topic修改为不同topic即可解决此问题. 如下图所示:
版权声明:本文为weixin_42503785原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。