【控制control】四足机器人动力学模型-SLIP
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对四足机器人动力学模型-VMC、SLIP和浮动机体模型做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、动力学建模构型方法
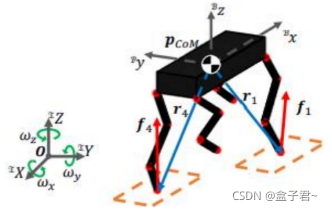
向量 rj 指定每只脚相对于身体 CoM 的位置,而力fj 提供每只脚下的力
地面接触反力与质心加速度示意图
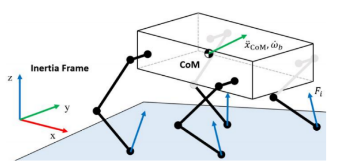
四足机器人动力学模型十分复杂,需要简化,否则公式与计算都很复杂。通过对复杂的动力学模型降维解耦,对实物模型进行简化,把四足机器人的驱动器和减速器忽略, 简化成为仅有连杆和转角分析。【防盗标记–盒子君hzj】因为机器人躯干的特性和腿部的特性相差较大,故分别独立建立两个模型:浮基单体动力学模型、多刚体动力学模型,动力学建模用到的方法无非是 Newton-Euler 或者 Lagrangian 等等。通过位姿确定各关节力矩合躯干合力矩的关系
把四足机器人看成一个单刚体模型和一个浮动基体模型。【防盗标记–盒子君hzj】平衡控制器的模型是一个高度简化的单刚体模型,这个模型也能用来做跳跃阶段的地面反作用力规划
二、四足机器人SLIP(弹簧加载倒立摆)模型
(1)SLIP的由来
通过对复杂的动力学模型降维解耦,通过对实物模型进行简化,把四足机器人的驱动器和减速器忽略, 简化成为仅有连杆和转角分析。把躯干看做坐标系基(固定)坐标系,分别对连杆(腿) 建立坐标系【防盗标记–盒子君hzj】。进行相对于固定的参考坐标系的运动作为时间的函数进行分析研究。将四足机器人简化为质量块加弹簧的模型。
(2)SLIP的目的
实现弹跳需要对Z轴虚拟力前馈进行规划,另外同时在支撑相时完成对姿态的控制产生相应的虚拟转矩T。
(3)SLIP建模与原理
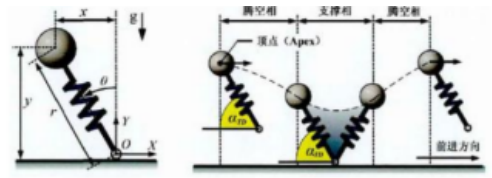
SLIP模型将躯干近似成一个质量块,将腿部连杆结构近似成一个弹簧,把整个步态周期分解成为四个过程:
1、使用SLIP模型进行近似,描述躯干和虚拟腿部的力矩关系,把躯干看做坐标系基(固定)坐标系,分别对连杆(腿) 建立坐标系。进行相对于固定的参考坐标系的运动作为时间的函数进行分析研究。【防盗标记–盒子君hzj】将四足机器人简化为质量块加弹簧的模型。实现弹跳需要对Z轴虚拟力前馈进行规划,另外同时在支撑相时完成对姿态的控制产生相应的虚拟转矩T。
2、 用于躯干和腿部的力分配+已知腿的虚拟力【即反作用力】求每个关节的力矩
3、SLIP模型将躯干近似成一个质量块,【防盗标记–盒子君hzj】将腿部连杆结构近似成一个弹簧,把整个步态周期分解成为四个过程:
第一过程:足端刚刚触地状态至弹簧压缩到最大状态,速度方向向下,大小先增大后减小,最后机器人的速度为零,这个过程机器人将重力势能与动能转化为弹簧的弹性势能(实际弹性势能与电机作用力相位相反相互抵消)
第二过程:足端弹簧压至到最大状态到足端刚刚离地状态,速度方向向上,大小先增大后减小,理想状态时该速度与触地时的速度大小相等方向相反。这个过程机器人的弹性势能转化为重力势能与动能,【防盗标记–盒子君hzj】这个过程恰恰与第一过程相反
第三过程:足端刚刚离地状态到机器上上升至最高状态,速度方向向上,大小一直减小,最后机器人的速度为零,这个过程机器人将动能转化为重力势能
第四过程:机器上上升至最高状态到足端刚刚触地状态,速度方向向下,大小一直增加,理想状态时该速度与离地时的速度大小相等方向相反。这个过程机器人的重力势能转化为动能,【防盗标记–盒子君hzj】这个过程恰恰与第三过程相反
(4)SLIP模型针对四足机器人步态的等效简化分析
SLIP模型适用于定向蹦跳步态与对角小跑步态。
(1)对定向蹦跳步态进行等效简化
定向蹦跳步态是一拍步态,由于机械结构是对称的,【防盗标记–盒子君hzj】每条腿的结构也一致,若蹦跳的周期四条腿都一致且同相,则该四条可以完全等效于一条腿,再把腿的质量忽略,连杆结构即可等效成弹簧,把躯干等效成质量,即可用SLIP模型分析。
(2)对对角小跑步态进行等效
对角小跑步态是两拍步态,故对角腿是同相同周期的,亦可以等效成为一条腿,此时四足机器人已经等效成为双足机器人,且该双足机器人步态周期一致,相位互差180度,同理,亦可用SLIP模型分析。
(5)SLIP模型失效条件分析
-抬腿过程发生碰撞
-触地过程踏空
-触地惯性跌倒